
Mathematik-Online-Lexikon:
|
|
[Home] [Lexikon] [Aufgaben] [Tests] [Kurse] [Begleitmaterial] [Hinweise] [Mitwirkende] [Publikationen] |
|
Mathematik-Online-Lexikon: | |
Erste Integrale und Phasen-DGL-System |
| A B C D E F G H I J K L M N O P Q R S T U V W X Y Z | Übersicht |
Annahme ![]() sei umkehrbar und
sei umkehrbar und
![]() die Umkehrung. (Man könnte
natürlich auch jedes andere
die Umkehrung. (Man könnte
natürlich auch jedes andere ![]() als umkehrbar annehmen und nachfolgende
Überlegungen entsprechend durchführen)
als umkehrbar annehmen und nachfolgende
Überlegungen entsprechend durchführen)
Das System

nennt man das zugehörige Phasen - DGL - System. Nach dem Existenz- und Eindeutigkeitssatz besitzt dies für beliebige
Anfangsbedingungen
![]() Lösungen. Die allgemeine
Lösung des Phasen - DGL - Systems hängt somit von
Lösungen. Die allgemeine
Lösung des Phasen - DGL - Systems hängt somit von ![]() beliebigen
Integrationskonstanten
beliebigen
Integrationskonstanten
![]() ab, die wegen der
Eindeutigkeit der Lösung einer Gleichung der Form
ab, die wegen der
Eindeutigkeit der Lösung einer Gleichung der Form
Wir konkretisieren dies an folgendem autonomen System:
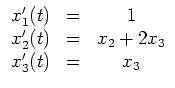
Man beachte, daß nach der dritten Gleichung
![]() Daher ist
Daher ist ![]() invertierbar.
invertierbar.
Als Phasen - DGL - System ergibt sich:
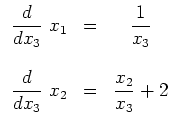
![]() löst die erste Gleichung.
löst die erste Gleichung.
Die zweite Phasen - DGL
besitzt die homogene Lösung
![]() Variation der Konstanten ergibt den Ansatz
Variation der Konstanten ergibt den Ansatz
![]() für eine
partikuläre Lösung. Einsetzen in die DGL ergibt
für eine
partikuläre Lösung. Einsetzen in die DGL ergibt

Es folgt
![]() und daher
und daher
![]() Die allgemeine Lösung der zweiten Gleichung ist dann
Die allgemeine Lösung der zweiten Gleichung ist dann
Somit folgt
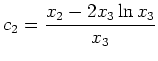
und
sind erste Integrale des gegebenen autonomen Systems.
| automatisch erstellt am 25. 1. 2006 |