
Mathematik-Online:
|
|
[Home] [Lexikon] [Aufgaben] [Tests] [Kurse] [Begleitmaterial] [Hinweise] [Mitwirkende] [Publikationen] |
|
Mathematik-Online: | |
Matrizen und lineare Gleichungssysteme |
| A B C D E F G H I J K L M N O P Q R S T U V W X Y Z | Übersicht |
Matrizen.
Sei ![]() ein Körper. Seien
ein Körper. Seien ![]() .
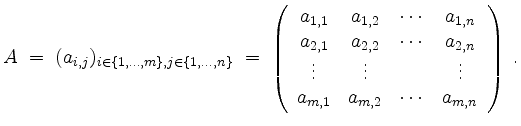
Eine Matrix
.
Eine Matrix ![]() der Größe
der Größe ![]() ist ein Tupel
ist ein Tupel
![]() von
von ![]() Elementen
aus
Elementen
aus ![]() , angeordnet in einer Tafel
, angeordnet in einer Tafel
Die Menge aller ![]() -Matrizen wird mit
-Matrizen wird mit
![]() bezeichnet. Die Elemente
bezeichnet. Die Elemente ![]() heißen die Einträge
der Matrix
heißen die Einträge
der Matrix ![]() .
.
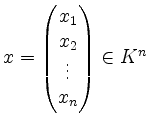
Matrizen der Größe ![]() werden auch als Spaltenvektoren bezeichnet. Wir schreiben auch
werden auch als Spaltenvektoren bezeichnet. Wir schreiben auch
![]() .
.
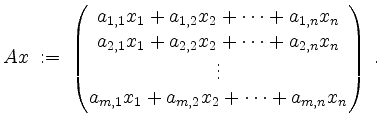
Ist
![]() und
und
 , so definiert man das Produkt von
Matrix und Spaltenvektor durch
, so definiert man das Produkt von
Matrix und Spaltenvektor durch
Ist
![]() eine Matrix, so heißt
eine Matrix, so heißt
die zu
Zeilenstufenform.
Eine Matrix
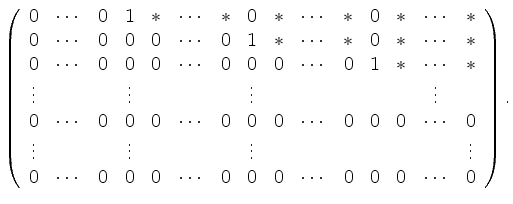
![]() heißt in Zeilenstufenform, falls es
Spaltenindices
heißt in Zeilenstufenform, falls es
Spaltenindices
![]() so gibt, daß für
so gibt, daß für
![]() gilt
gilt
![]() , und sowohl links als
auch oberhalb als auch unterhalb von
, und sowohl links als
auch oberhalb als auch unterhalb von
![]() alle Einträge der Matrix gleich 0
sind. Die Zahlen
alle Einträge der Matrix gleich 0
sind. Die Zahlen
![]() heißen dann die ausgewählten Spaltenindices. Eine Matrix in Zeilenstufenform sieht so aus:
heißen dann die ausgewählten Spaltenindices. Eine Matrix in Zeilenstufenform sieht so aus:
Eine elementare Zeilenumformung einer Matrix ![]() ist eine der folgenden Operationen.
ist eine der folgenden Operationen.
Der Gaußsche Algorithmus ist ein Verfahren, mit dem eine beliebige Matrix durch elementare Zeilenumformungen in Zeilenstufenform gebracht werden kann. Dabei geht man wie folgt vor.
Lineare Gleichungssysteme.
Sei ![]() ein Körper. Seien
ein Körper. Seien ![]() .
Ein lineares Gleichungssystem mit
.
Ein lineares Gleichungssystem mit ![]() Gleichungen in
Gleichungen in ![]() Unbekannten ist gegeben durch
Unbekannten ist gegeben durch
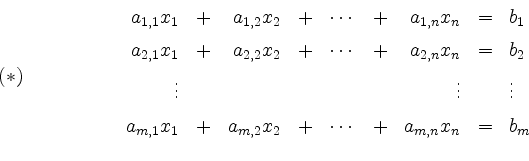
mit gegebenen Koeffizienten
Gesucht sind dabei
![]() aus
aus ![]() so, daß alle obigen Gleichungen erfüllt sind.
so, daß alle obigen Gleichungen erfüllt sind.
Die Variablen
![]() heißen die Unbekannten des Gleichungssystems
heißen die Unbekannten des Gleichungssystems ![]() .
.
Die Matrix
![]() heißt die Koeffizientenmatrix von
heißt die Koeffizientenmatrix von ![]() .
.
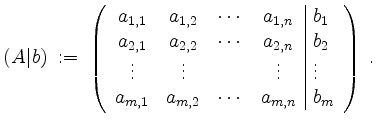
Die erweiterte Koeffizientenmatrix von ![]() ist gegeben durch
ist gegeben durch
Schreiben wir
 und
und
 , so wird
, so wird ![]() zur vektoriellen Gleichung
zur vektoriellen Gleichung
Die Menge
der Vektoren
Im Falle
 heißt das Gleichungssystem homogen,
im anderen Falle inhomogen.
heißt das Gleichungssystem homogen,
im anderen Falle inhomogen.
Ist
![]() eine partikuläre Lösung, d.h. ein Vektor, für den
eine partikuläre Lösung, d.h. ein Vektor, für den ![]() ist, so gilt für die Lösungsmenge stets
ist, so gilt für die Lösungsmenge stets
D.h. die Lösungsmenge des inhomogenen Gleichungssystems
Lösungsverfahren.
Es seien ![]() und
und ![]() wie oben. Um die Lösungsmenge
wie oben. Um die Lösungsmenge ![]() zu bestimmen, wende man zunächst den Gaußschen Algorithmus
auf die erweiterte Matrix
zu bestimmen, wende man zunächst den Gaußschen Algorithmus
auf die erweiterte Matrix ![]() an, um
an, um ![]() in Zeilenstufenform zu bringen. Die Spalte des Vektors
in Zeilenstufenform zu bringen. Die Spalte des Vektors ![]() wird hierbei
mitgeführt. Das so umgeformte System hat dann dieselbe Lösungsmenge wie das ursprüngliche System. Der Einfachheit halber
bezeichnen wir die dabei schließlich erhaltene umgeformte Matrix wiederum mit
wird hierbei
mitgeführt. Das so umgeformte System hat dann dieselbe Lösungsmenge wie das ursprüngliche System. Der Einfachheit halber
bezeichnen wir die dabei schließlich erhaltene umgeformte Matrix wiederum mit ![]() .
.
Seien
![]() die ausgewählten Spaltenindices in
die ausgewählten Spaltenindices in ![]() . Ist
. Ist ![]() für ein
für ein ![]() , so ist
, so ist
![]() , d.h.
das Gleichungssystem
, d.h.
das Gleichungssystem ![]() ist unlösbar.
Ansonsten findet man eine partikuläre Lösung
ist unlösbar.
Ansonsten findet man eine partikuläre Lösung ![]() , indem man an die Stellen
, indem man an die Stellen
![]() von
von ![]() jeweils die Einträge
jeweils die Einträge
![]() von
von ![]() einsetzt, und alle anderen Einträge zu Null setzt (positives Einfüllen).
einsetzt, und alle anderen Einträge zu Null setzt (positives Einfüllen).
Seien ferner
![]() die nicht ausgewählten Spaltenindices,
die nicht ausgewählten Spaltenindices, ![]() . Dann findet man Lösungen
. Dann findet man Lösungen
![]() des zugehörigen homogenen Systems
des zugehörigen homogenen Systems ![]() , indem man zunächst an der Stelle
, indem man zunächst an der Stelle ![]() von
von
![]() eine
eine ![]() , an den Stellen aller anderen nicht ausgewählten Spaltenindices eine 0
setzt. Sodann fülle man das
jeweilige Negative der ersten
, an den Stellen aller anderen nicht ausgewählten Spaltenindices eine 0
setzt. Sodann fülle man das
jeweilige Negative der ersten ![]() Einträge der Spalte
Einträge der Spalte ![]() von oben nach unten in die noch freien Stellen von
von oben nach unten in die noch freien Stellen von
![]() ein (negatives Einfüllen).
ein (negatives Einfüllen).
Zur Probe rechne man ![]() und
und ![]() für
für
![]() nach, entweder mit der umgeformten, oder -
was aufwendiger, aber sicherer ist - mit der ursprünglichen Matrix
nach, entweder mit der umgeformten, oder -
was aufwendiger, aber sicherer ist - mit der ursprünglichen Matrix ![]() .
.
Die Lösungsmenge ist dann
Beispiele:
| automatisch erstellt am 11. 8. 2006 |