

Mathematik-Online-Kurs: Lineare Algebra - Lineare Gleichungssysteme - Klassifikation und allgemeine Struktur
|
|
[Home] [Lexikon] [Aufgaben] [Tests] [Kurse] [Begleitmaterial] [Hinweise] [Mitwirkende] [Publikationen] |
|
|
Mathematik-Online-Kurs: Lineare Algebra - Lineare Gleichungssysteme - Klassifikation und allgemeine Struktur | ||
Lineares Gleichungssystem | ||
| [vorangehende Seite] [nachfolgende Seite] | [Gesamtverzeichnis][Seitenübersicht] |
Das lineare Gleichungssystem nennt man homogen, wenn ![]() ,
sonst bezeichnet man es als inhomogen.
,
sonst bezeichnet man es als inhomogen.
Für ein reelles (
![]() ) oder komplexes (
) oder komplexes (
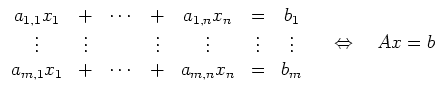
![]() ) lineares Gleichungssystem
wird
) lineares Gleichungssystem
wird ![]() nicht explizit angegeben. Welcher Fall vorliegt, ist meist aus dem Zusammenhang
ersichtlich.
nicht explizit angegeben. Welcher Fall vorliegt, ist meist aus dem Zusammenhang
ersichtlich.
Besitzt das Lineare Gleichungssystem keine Lösung (im Allgemeinen für ![]() ),
so bezeichnet man es als überbestimmt. Man spricht in diesem Fall auch von
einem Ausgleichsproblem. Ein Lineares Gleichungssystem mit keiner eindeutigen
Lösung (im Allgemeinen für
),
so bezeichnet man es als überbestimmt. Man spricht in diesem Fall auch von
einem Ausgleichsproblem. Ein Lineares Gleichungssystem mit keiner eindeutigen
Lösung (im Allgemeinen für ![]() ) nennt man unterbestimmt.
) nennt man unterbestimmt.
![\includegraphics[width=.6\linewidth]{b_interpolation}](/inhalt/beispiel/beispiel491/img10.png)
In dem abgebildeten Beispiel einer Tour-de-France-Etappe ist mit jedem Datenpunkt eine Exponentialfunktion
![\includegraphics[width=\moimagesize]{b_elektrischer_schaltkreis}](/inhalt/beispiel/beispiel4/img11.png)
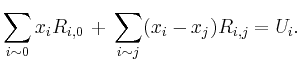
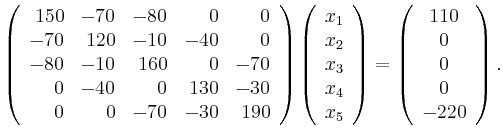
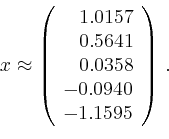
Beispielsweise erhält man für den abgebildeten Schaltkreis das lineare Gleichungssystem
| [vorangehende Seite] [nachfolgende Seite] | [Gesamtverzeichnis][Seitenübersicht] |
| automatisch erstellt am 14.6.2012 |