
Mathematik-Online-Kurs: Repetitorium HM II - Lineare Algebra
|
|
[Home] [Lexikon] [Aufgaben] [Tests] [Kurse] [Begleitmaterial] [Hinweise] [Mitwirkende] [Publikationen] |
|
Mathematik-Online-Kurs: Repetitorium HM II - Lineare Algebra | |
Die Jordanform |
| [vorangehende Seite] [nachfolgende Seite] | [Gesamtverzeichnis][Seitenübersicht] |
Eigenräume und Haupträume.
Sei
![]() . Ein Eigenwert von
. Ein Eigenwert von ![]() ist eine komplexe Zahl
ist eine komplexe Zahl
![]() derart, daß
es einen Vektor
derart, daß
es einen Vektor
![]() gibt mit
gibt mit
Jeder solche Vektor heißt Eigenvektor von ![]() zum Eigenwert
zum Eigenwert ![]() .
.
Das charakteristische Polynom von ![]() ist gegeben durch
ist gegeben durch
Stets läßt sich ![]() faktorisieren in
faktorisieren in
wobei
Der Exponent ![]() heißt algebraische Vielfachheit des Eigenwerts
heißt algebraische Vielfachheit des Eigenwerts ![]() .
.
Es ist
und
Der Eigenraum zum Eigenwert ![]() von
von ![]() ist gegeben durch
ist gegeben durch
Seine Dimension heißt geometrische Vielfachheit des Eigenwerts
Der Hauptraum zum Eigenwert ![]() von
von ![]() ist gegeben durch
ist gegeben durch
Seine Dimension ist gleich der algebraischen Vielfachheit von
Insbesondere ist
![]() (geometrische Vielfachheit von
(geometrische Vielfachheit von
![]() )
)![]() (algebraische Vielfachheit von
(algebraische Vielfachheit von
![]() )
)![]() .
.
Die Zerlegung
heißt die Hauptraumzerlegung von
Die Jordanform.
Sei
![]() und
und ![]() . Die Matrix
. Die Matrix
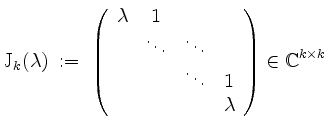
heißt Jordanblock der Größe (oder Kantenlänge)
Eine Matrix
![]() heißt in Jordanform, falls sie eine aus Jordanblöcken bestehende Blockdiagonalmatrix ist.
heißt in Jordanform, falls sie eine aus Jordanblöcken bestehende Blockdiagonalmatrix ist.
Sei
![]() gegeben. Wir wollen eine reguläre Matrix
gegeben. Wir wollen eine reguläre Matrix
![]() so finden, daß
so finden, daß ![]() in Jordanform ist.
in Jordanform ist.
Algorithmus.
Ist
![]() ein Tupel von Vektoren im
ein Tupel von Vektoren im
![]() , und ist
, und ist
![]() eine Matrix, so sei
eine Matrix, so sei
Der nun folgende Algorithmus liefert eine Transformationsmatrix ![]() sowie eine Jordanform
sowie eine Jordanform ![]() der Matrix
der Matrix ![]() .
.
Wir können dies in einem Tableau eintragen.
| Stufe |
|
| Stufe |
|
| Stufe |
|
| Stufe |
|
Im Tableau trägt man dabei für
![]() jeweils das
jeweils das ![]() -fache der Vektoren einer Stufe
-fache der Vektoren einer Stufe ![]() in die Stufe
in die Stufe ![]() ein, und bildet dann das
Tupel
ein, und bildet dann das
Tupel
![]() aus dem Tupel
aus dem Tupel
![]() durch Streichen von Vektoren derart, daß schließlich in der Stufe
durch Streichen von Vektoren derart, daß schließlich in der Stufe ![]() wieder eine Basisergänzung
zu
wieder eine Basisergänzung
zu
![]() steht. Das Tableau sieht dann wie folgt aus.
steht. Das Tableau sieht dann wie folgt aus.
| Stufe |
|
| Stufe |
|
| Stufe |
|
| Stufe |
|
| Stufe |
|
und trage das Tupel
als Spalten in die zu bildende Matrix
Diese Ketten kann man im Tableau direkt ablesen, wenn man in Schritt (4)
jeden Vektor ![]() der Stufe
der Stufe ![]() mit seinem Bild
mit seinem Bild ![]() in der Stufe
in der Stufe ![]() verbindet, für alle
verbindet, für alle ![]() . Auf diese Art gewinnt man Ketten, die
alle in Stufe
. Auf diese Art gewinnt man Ketten, die
alle in Stufe ![]() beginnen. Die Vektoren jeder Kette trägt man dann in die Matrix
beginnen. Die Vektoren jeder Kette trägt man dann in die Matrix ![]() ein,
jeweils beginnendend mit dem Vektor in Stufe
ein,
jeweils beginnendend mit dem Vektor in Stufe ![]() .
.
Trage schließlich in die zu bildende Matrix ![]() die Jordanblöcke
die Jordanblöcke

in dieser Reihenfolge auf der Hauptdiagonalen ein.
Hat man dies für alle
![]() durchgeführt, so haben
durchgeführt, so haben ![]() und
und ![]() am Ende die gewünschten Eigenschaften, d.h. es gilt
am Ende die gewünschten Eigenschaften, d.h. es gilt
![]() und
und ![]() ist in Jordanform.
ist in Jordanform.
Erläuterungen zu diesem Algorithmus.
Die Jordanform einer Matrix ![]() ist bis auf Reihenfolge der Jordanblöcke eindeutig bestimmt. Die Matrix
ist bis auf Reihenfolge der Jordanblöcke eindeutig bestimmt. Die Matrix ![]() ist hingegen
nicht eindeutig bestimmt.
ist hingegen
nicht eindeutig bestimmt.
Minimalpolynom.
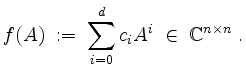
Sei
![$\displaystyle f(X) \;=\; \sum_{i=0}^d c_i X^i\;\in\;\mathbb{C}[X]
$](/inhalt/vstatisch/vstatisch54/img113.png)
ein Polynom. Setze
Man sagt, das Polynom ![]() annulliert die Matrix
annulliert die Matrix ![]() , falls
, falls ![]() .
.
Das normierte Polynom kleinsten Grades, welches ![]() annulliert, heißt das Minimalpolynom von
annulliert, heißt das Minimalpolynom von ![]() und wird mit
und wird mit ![]() bezeichnet.
Jedes Polynom, welches
bezeichnet.
Jedes Polynom, welches ![]() annulliert, ist ein Vielfaches von
annulliert, ist ein Vielfaches von ![]() .
.
Das Minimalpolynom von ![]() ergibt sich zu
ergibt sich zu
wobei
Insbesondere ist die Nullstellenmenge von ![]() gleich der Nullstellenmenge von
gleich der Nullstellenmenge von ![]() , nämlich gleich der Menge der Eigenwerte
, nämlich gleich der Menge der Eigenwerte
![]() von
von ![]() .
.
Berechnet man das Minimalpolynom von ![]() direkt, in der Regel unter
Zuhilfenahme von iteriert mit
direkt, in der Regel unter
Zuhilfenahme von iteriert mit ![]() multiplizierten Vektoren und
entsprechenden linearen Gleichungssystemen, so kann man auch das Minimalpolynom zur Berechnung der Eigenwerte von
multiplizierten Vektoren und
entsprechenden linearen Gleichungssystemen, so kann man auch das Minimalpolynom zur Berechnung der Eigenwerte von ![]() heranziehen. Wir wollen dies hier nicht weiter verfolgen.
heranziehen. Wir wollen dies hier nicht weiter verfolgen.
Der Satz von Cayley-Hamilton besagt, daß
![]() ist. Insbesondere ist
ist. Insbesondere ist ![]() ein Vielfaches von
ein Vielfaches von ![]() .
Dies spiegelt sich in den Exponenten wieder, es ist
.
Dies spiegelt sich in den Exponenten wieder, es ist
![]() .
.
Diagonalisierbarkeit.
Die geometrische Vielfachheit eines Eigenwertes von ![]() ist gleich der Anzahl der Jordanblöcke zu diesem Eigenwert.
Seine algebraische Vielfachheit ist
gleich der Summe der Kantenlängen der Jordanblöcke zu diesem Eigenwert, d.h. seine Vielfachheit auf der Hauptdiagonalen.
ist gleich der Anzahl der Jordanblöcke zu diesem Eigenwert.
Seine algebraische Vielfachheit ist
gleich der Summe der Kantenlängen der Jordanblöcke zu diesem Eigenwert, d.h. seine Vielfachheit auf der Hauptdiagonalen.
Die Matrix ![]() heißt diagonalisierbar, falls es eine invertierbare Matrix
heißt diagonalisierbar, falls es eine invertierbare Matrix
![]() gibt mit
gibt mit
![]() für eine Diagonalmatrix
für eine Diagonalmatrix
![]() ,
d.h. alle Einträge von
,
d.h. alle Einträge von ![]() außerhalb der Diagonalen sollen gleich Null sein. Eine Diagonalmatrix ist eine spezielle Jordanform, in welcher alle Jordanblöcke
Größe
außerhalb der Diagonalen sollen gleich Null sein. Eine Diagonalmatrix ist eine spezielle Jordanform, in welcher alle Jordanblöcke
Größe ![]() besitzen.
besitzen.
Die Matrix ![]() ist diagonalisierbar genau dann, wenn für jeden Eigenwert von
ist diagonalisierbar genau dann, wenn für jeden Eigenwert von ![]() seine geometrische Vielfachheit gleich seiner algebraischen Vielfachheit ist.
seine geometrische Vielfachheit gleich seiner algebraischen Vielfachheit ist.
Ist ![]() als diagonalisierbar bekannt, so vereinfacht sich der Algorithmus zur Findung der Jordanform dahingehend,
daß man lediglich Basen der Eigenräume von
als diagonalisierbar bekannt, so vereinfacht sich der Algorithmus zur Findung der Jordanform dahingehend,
daß man lediglich Basen der Eigenräume von ![]() finden muß. In diesem Falle sind die Spalten von
finden muß. In diesem Falle sind die Spalten von ![]() die gefundenen Basisvektoren
der Eigenräume, und die Diagonaleinträge von
die gefundenen Basisvektoren
der Eigenräume, und die Diagonaleinträge von ![]() sind die Eigenwerte in entsprechender Reihenfolge.
sind die Eigenwerte in entsprechender Reihenfolge.
| [vorangehende Seite] [nachfolgende Seite] | [Gesamtverzeichnis][Seitenübersicht] |
| automatisch erstellt am 16.2.2011 |